Wiimote+Robot
Direct, multi-axis control of an industrial robo.
ABB Norway, Postdoc, 2008 With Johan Gunnar.
ABB Norway, Postdoc, 2008 With Johan Gunnar.
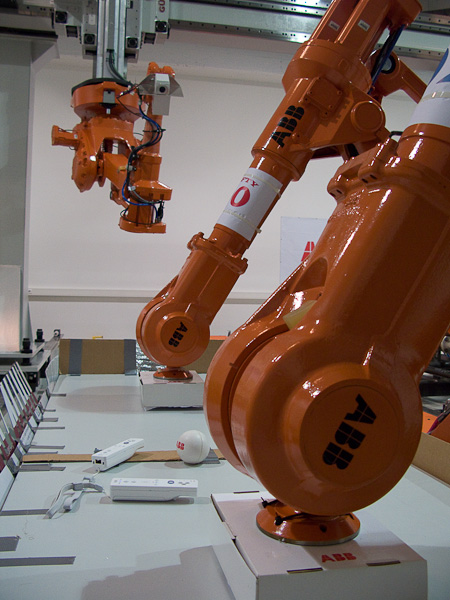
Experiments in gestural control of a six-axis (plus two external axes) industrial robot. The first implementation we are aware of using such control of a standard industrial robot in a tight feedback loop with people.
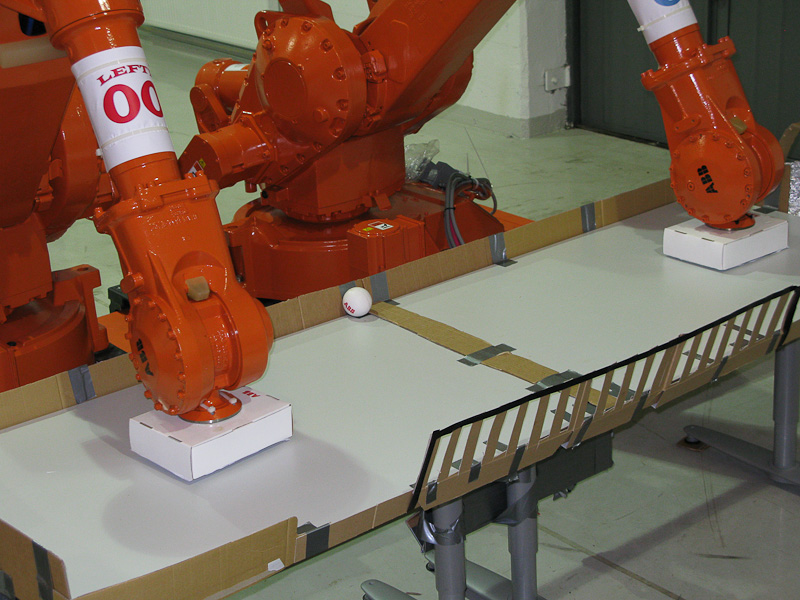
As an experiment, we made a table-top game - Wiiroball - which allows two players to each control a motion-restricted robot with a Nintendo Wii controller. The ball is butted into the opponent’s goal, and a third, gantry mounted robot swings around to pick it up and put it back into play.
While the Wiimote supports a very natural form of interaction, we are still seeking to address some fundamental issues with control latency to improve the experience.